A continuación muestro un diagrama esquemático:
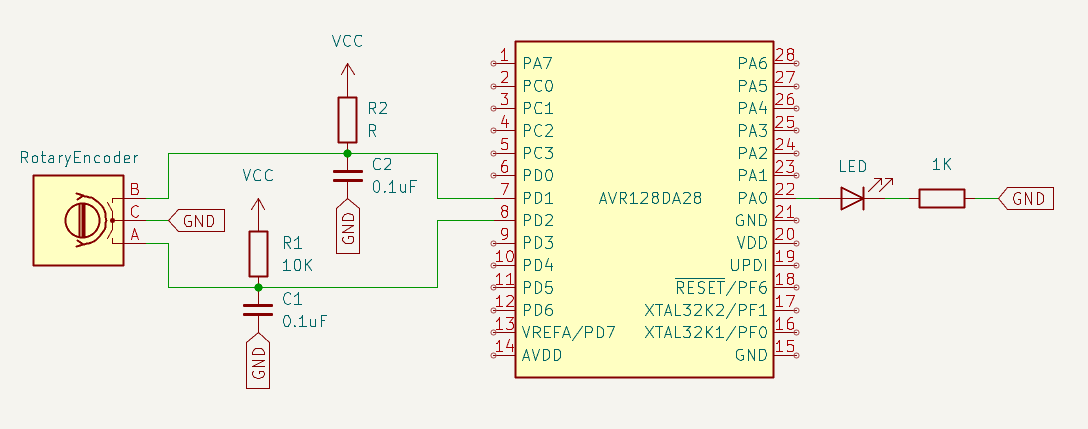
Conexion:
- PA0: PWM out LED
- PD1: Encoder A
- PD2: Encoder B
Código fuente
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| #include <avr/io.h>
#include <util/delay.h>
#include <stdint.h>
int main(void) {
CCP = CCP_IOREG_gc;
CLKCTRL.OSCHFCTRLA = CLKCTRL_FRQSEL_24M_gc;
/* TCA0 single-slope PWM on PA0, F_PWM = 24M/(64*256) ≈ 1.46 kHz */
PORTA.DIRSET = PIN0_bm;
TCA0.SINGLE.PER = 255;
TCA0.SINGLE.CMP0 = 0;
TCA0.SINGLE.CTRLB = TCA_SINGLE_WGMODE_SINGLESLOPE_gc | TCA_SINGLE_CMP0EN_bm;
TCA0.SINGLE.CTRLA = TCA_SINGLE_CLKSEL_DIV64_gc | TCA_SINGLE_ENABLE_bm;
/* Encoder pins as inputs with internal pull-ups */
PORTD.DIRCLR = PIN1_bm | PIN2_bm;
PORTD.PIN1CTRL = PORT_PULLUPEN_bm;
PORTD.PIN2CTRL = PORT_PULLUPEN_bm;
uint8_t brightness = 0;
uint8_t prev_a = (PORTD.IN & PIN1_bm) != 0;
while (1) {
uint8_t a = (PORTD.IN & PIN1_bm) != 0;
if (prev_a && !a) { /* falling edge of A */
uint8_t b = (PORTD.IN & PIN2_bm) != 0;
if (b) brightness = (brightness <= 245) ? brightness + 10 : 255;
else brightness = (brightness >= 10) ? brightness - 10 : 0;
TCA0.SINGLE.CMP0 = brightness;
}
prev_a = a;
_delay_ms(1); /* simple debounce */
}
}
|
Para compilarlo deberá ejecutar el siguiente comando:
1
2
3
4
| avr-gcc -mmcu=avr128da28 \
-DF_CPU=24000000UL \
-g -Os -std=gnu99 -Wall -o main.elf *.c
avr-objcopy -O ihex main.elf main.hex
|
Para subir el programa al microcontrolador, deberá ejecutar el siguiente comando:
1
| avrdude -c serialupdi -p avr128da28 -P /dev/tty.usbserial-2110 -e -F
|
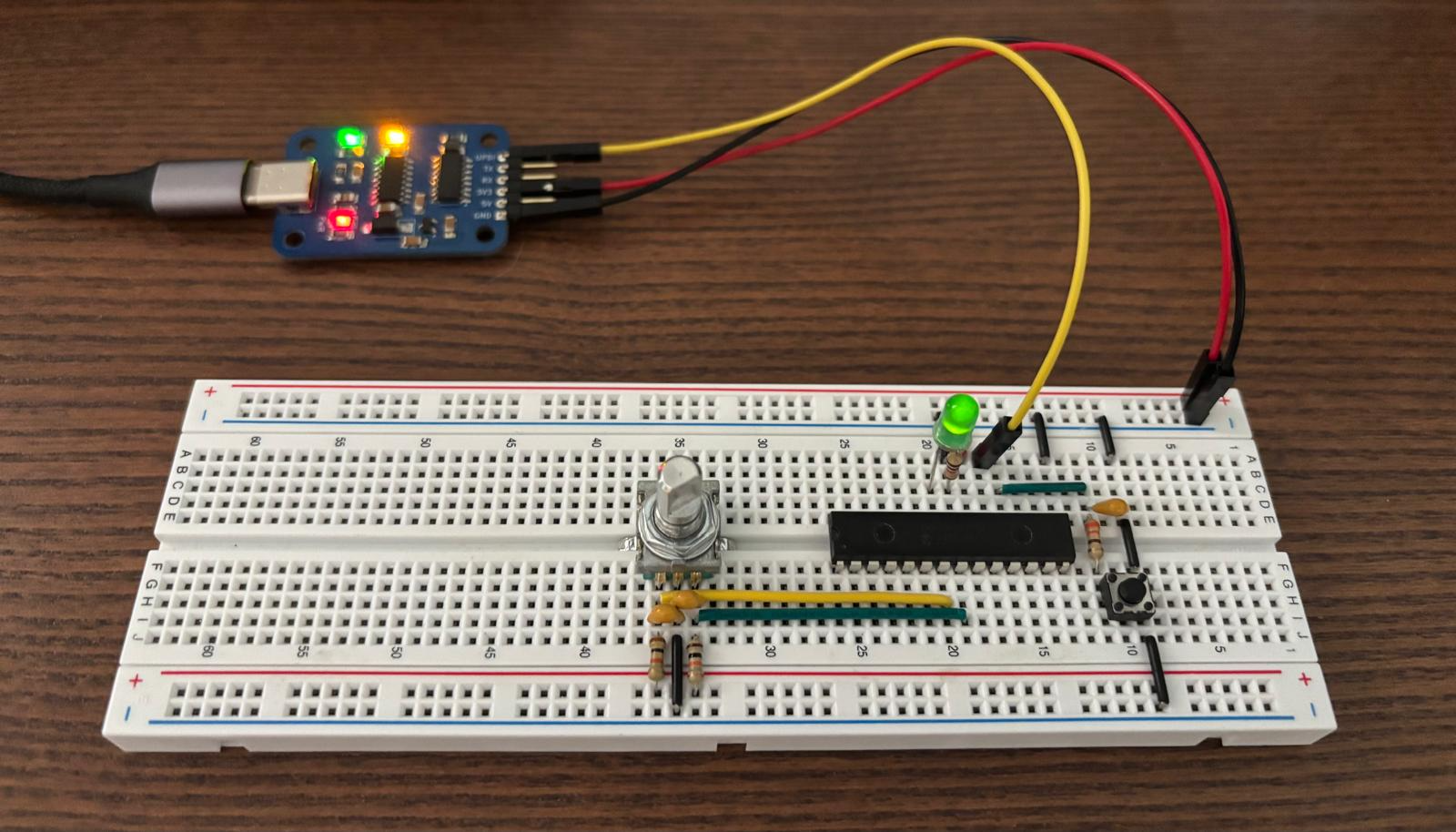
Si todo fue bien, podrá disfrutar del rotary encoder y el LED.